Mes deux posts sur LTspice ont eu du succès. J’ai décidé d’en faire un troisième, assez long. J’en profite pour faire de la pub sur d’autres articles de mon blog concernant des sujets tout aussi passionnants comme TensorFlow ou encore la BeagleBone Black (qui est vachement moins connue, je l’admets, mais c’est de la balle!). Surtout, n’hésitez pas à laisser des commentaires !!!
Problématique
Voilà le problème, qui m’a été soumis par mon beau-père, il y a déjà fort fort longtemps, du temps où j’étais jeune quoi.
Chargeons un condensateur dans un premier temps par une alimentation continue. Dans un second temps nous « débranchons » la source de tension et nous mettons un second condensateur, vide, en parallèle. Pas d’autre composant. Quelle sera alors la tension aux bornes des deux condensateurs?

Mon intuition me dit que la tension sera divisée par 2 puisque la charge sera répartie entre les deux capas. Si on note U la tension initiale du premier condensateur chargé et Uf la tension finale en régime stationnaire. Est-ce qu’on a Uf = U/2?
D’un autre côté, l’énergie stockée dans un condensateur est de 1/2 C U*U (voir ici pour le calcul de l’énergie). Si on note C1 la valeur du condensateur qu’on charge au début et C2 celui qui est déchargé. L’énergie avant de fermer le circuit est de :
 Après, en « régime stationnaire », l’énergie sera répartie sur les deux capas :
Après, en « régime stationnaire », l’énergie sera répartie sur les deux capas :
 où Uf est la tension finale que nous voulons calculer. Comme il n’y a pas de résistance dans le circuit, l’énergie est conservée :
où Uf est la tension finale que nous voulons calculer. Comme il n’y a pas de résistance dans le circuit, l’énergie est conservée :
 Si les capas sont égales C1 = C2 = C, on obtient
Si les capas sont égales C1 = C2 = C, on obtient  On en déduit que la tension finale sera égale à la tension initiale divisée par la racine carrée de 2. Et cela quelque soit la capacité (égale) des condensateurs. Étonnant non?
On en déduit que la tension finale sera égale à la tension initiale divisée par la racine carrée de 2. Et cela quelque soit la capacité (égale) des condensateurs. Étonnant non?
Voyons ça dans LTspice.
Dans une première partie, nous allons nous familiariser avec le composant « Voltage Controlled Switch » qui permet de simuler un interrupteur.
Dans la seconde partie, nous étudierons le problème posé – en utilisant 2 composants « Voltage Controlled Switch ».
Partie I : « Voltage Controlled Switch » dans un circuit RC
Pour simuler ce truc, nous allons avoir besoin d’interrupteurs, un pour ouvrir le circuit de charge et un second pour fermer le circuit capacitif.
Or, il n’existe pas d’interrupteur simple dans LTspice et cela paraît logique parce c’est de la simulation, l’interrupteur est soit dans une position, soit dans une autre, mais une unique position par simulation. Pour commuter automatiquement, il faut adopter une autre stratégie.
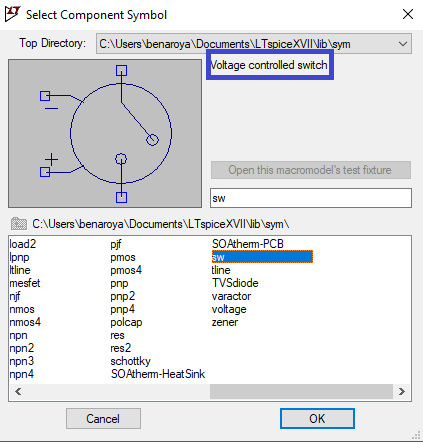
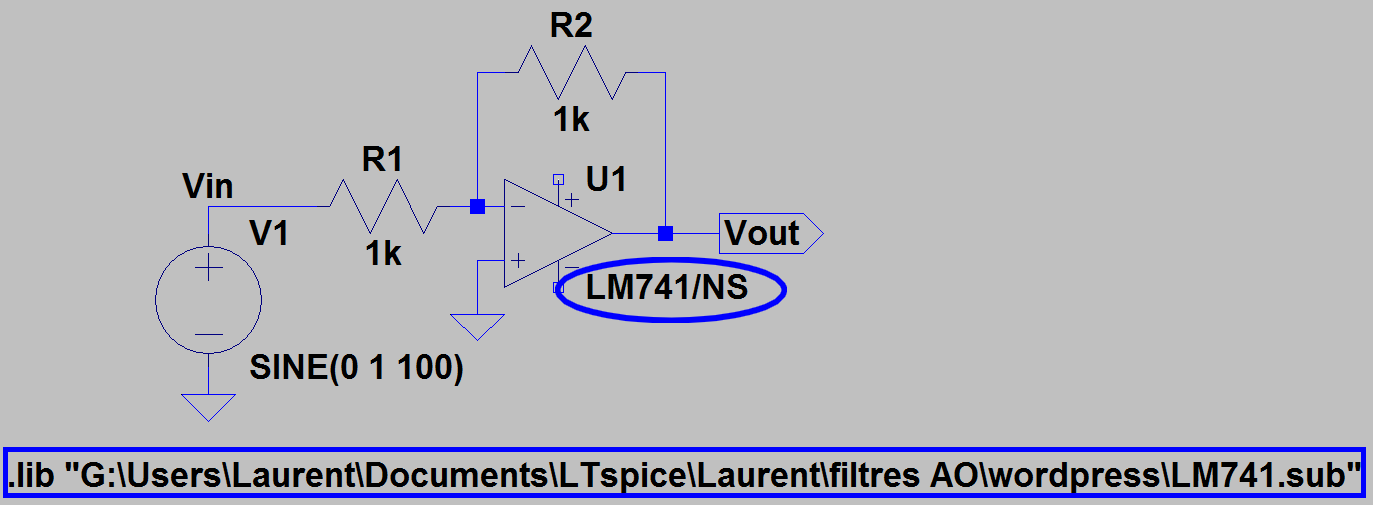
Nous allons utiliser un composant appelé « Voltage Controlled Switch ». Voir discussion créer un interrupteur LTpsice.
Dans un premier temps, nous allons étudier un circuit RC simple et y ajouter un composant sw « Voltage Controlled Switch ». Ce composant sw a une résistance qui peut « switcher » entre deux valeurs en fonction d’une tension et d’un seuil. En fixant la résistance à une valeur faible (< 1 Ω) dans un cas et à une valeur grande dans l’autre cas (> 1 M Ω, voire plus), cela permet de simuler un interrupteur, contrôlé par une tension externe. En fait, il va y avoir un circuit principal (RC dans ce cas) et un second circuit avec une unique source de tension (composant « voltage »). Celui-ci pilote l’interrupteur (switch) .
Noter qu’il existe le même type de composant contrôlé en courant « Current Controlled Switch » csw, mais nous n’en parlerons pas dans ce post.
Le composant sw « Voltage Controlled Switch »
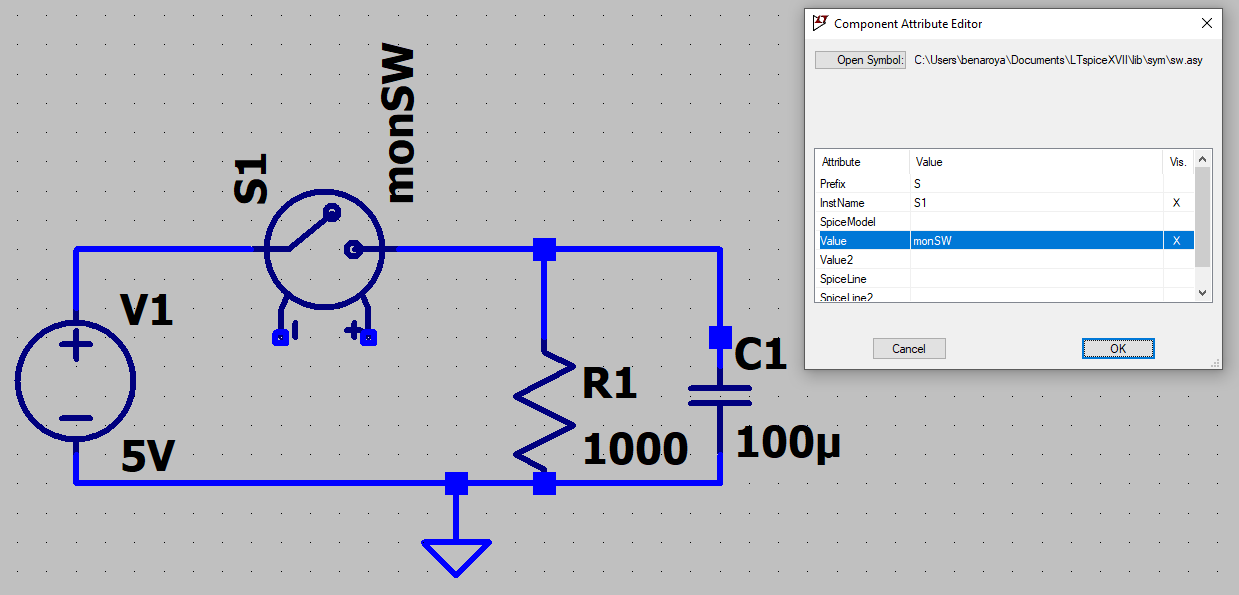
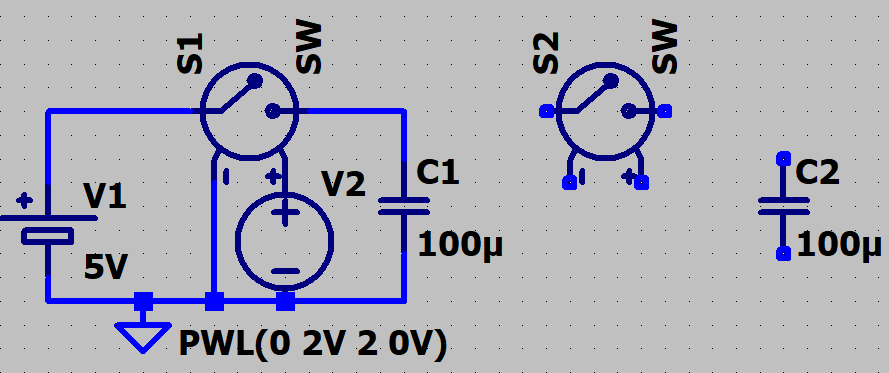
Dans un circuit RC, on introduit le composant sw:

En faisant un clic droit sur le composant sw, j’ai mis la valeur « value » à « monSW ». Il nous faut ajouter trois choses :
- une source de tension pour piloter pour le sw
- une directive pour spécifier les résistances du composant sw et la tension seuil
- le temps d’étude en régime transitoire (run, transient)
On ajoute une « spice directive », qu’on trouve soit sur la barre d’outil, soit dans l’onglet « édition » -> « Spice directive ». On ajoute la directive .model monSW SW(Ron=1 Roff=1Meg Vt=1 Vh=0). Cela signifie que le composant que j’ai renommé monSW à une tension seuil Vt de 1V – une tension d’hystérésis Vh de 0V, c-a-d que le seuil de déclenchement est le même en diminuant ou en augmentant la tension de commande – une résistance Ron de 1 Ω si la tension externe est supérieure à Vt et une résistance de 1 M Ω si la tension est inférieure à Vt . Du coup, si la tension est supérieure à 1 V, le circuit est fermé et sinon le circuit est considéré comme ouvert. On peut ajuster Ron et Roff si bessoin Voir ici pour plus d’information (en Anglais).

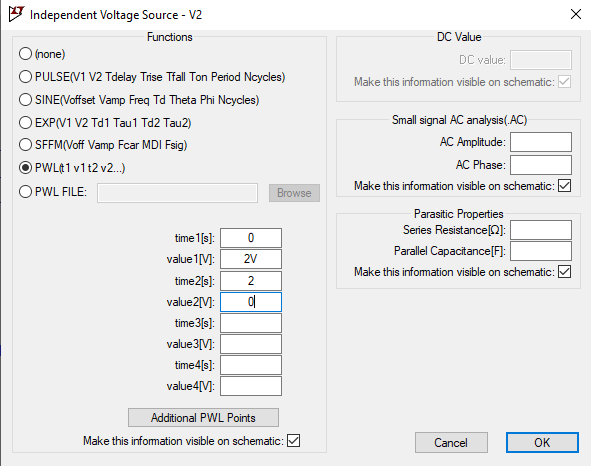
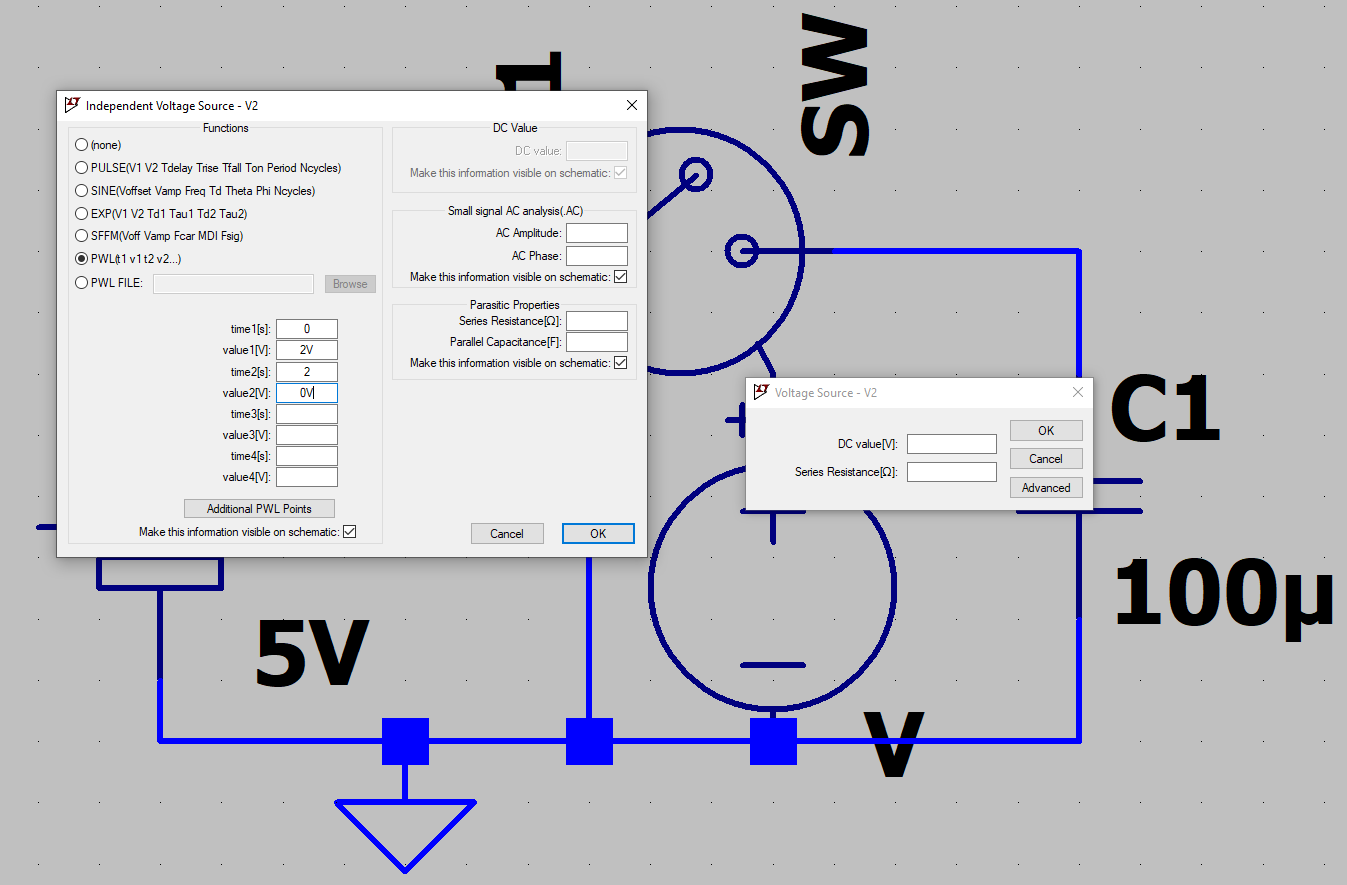
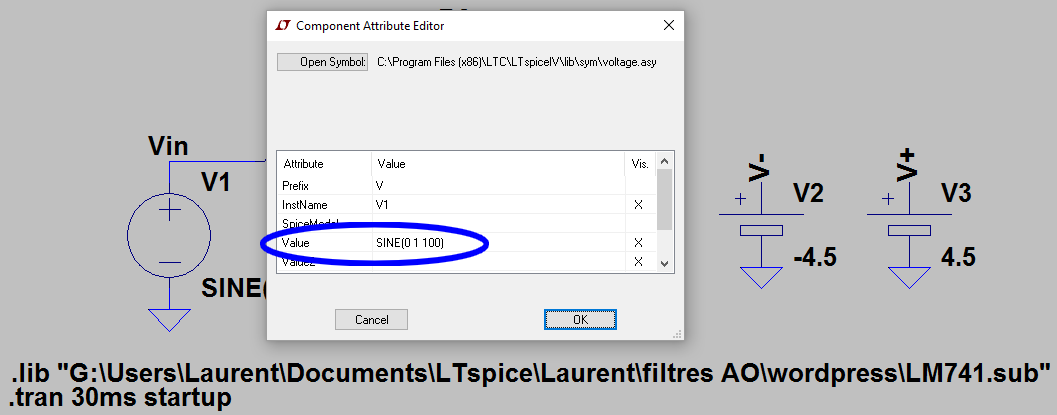
Ensuite, on règle la tension de commande. Click droit sur le composant voltage entouré en rouge dans la figure ci-dessus et puis on clique sur « advanced »

On choisit/coche PWL(t1 v1 t2 v2) à gauche et pour t=0 on met 2V et pour t=2 (secondes) on met 0V. La tension va passer linéairement de 2V à 0V en 2 secondes.

Du coup, la résistance au départ est de 1 Ω et la tension va passer en dessous de 1V à t= 1 seconde et ouvrir le circuit (1 M Ω).
Reste à cliquer sur le petit bonhomme qui court dans la barre à outils, ou aller dans l’onglet « simulate » puis « run ». Une fenêtre s’ouvre et on met 3 secondes pour le « Stop time » et on coche la case « Start external DC supply voltages at 0V » ça nous donne la directive suivante: « .tran 3 startup ».

Au final, le circuit est:

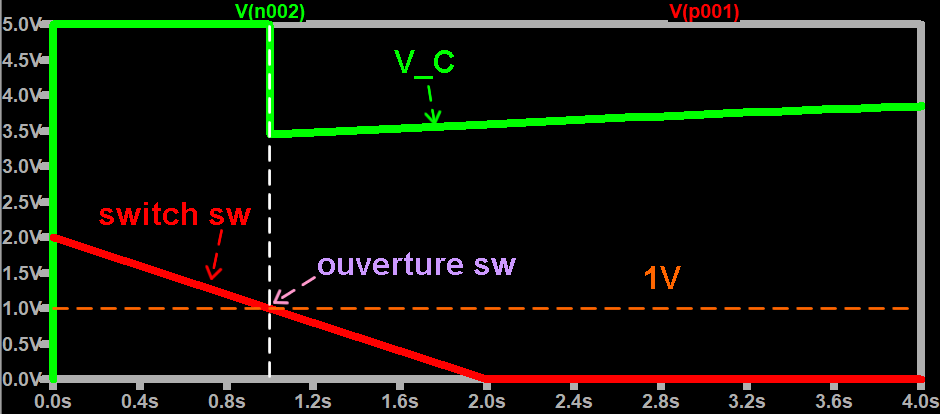
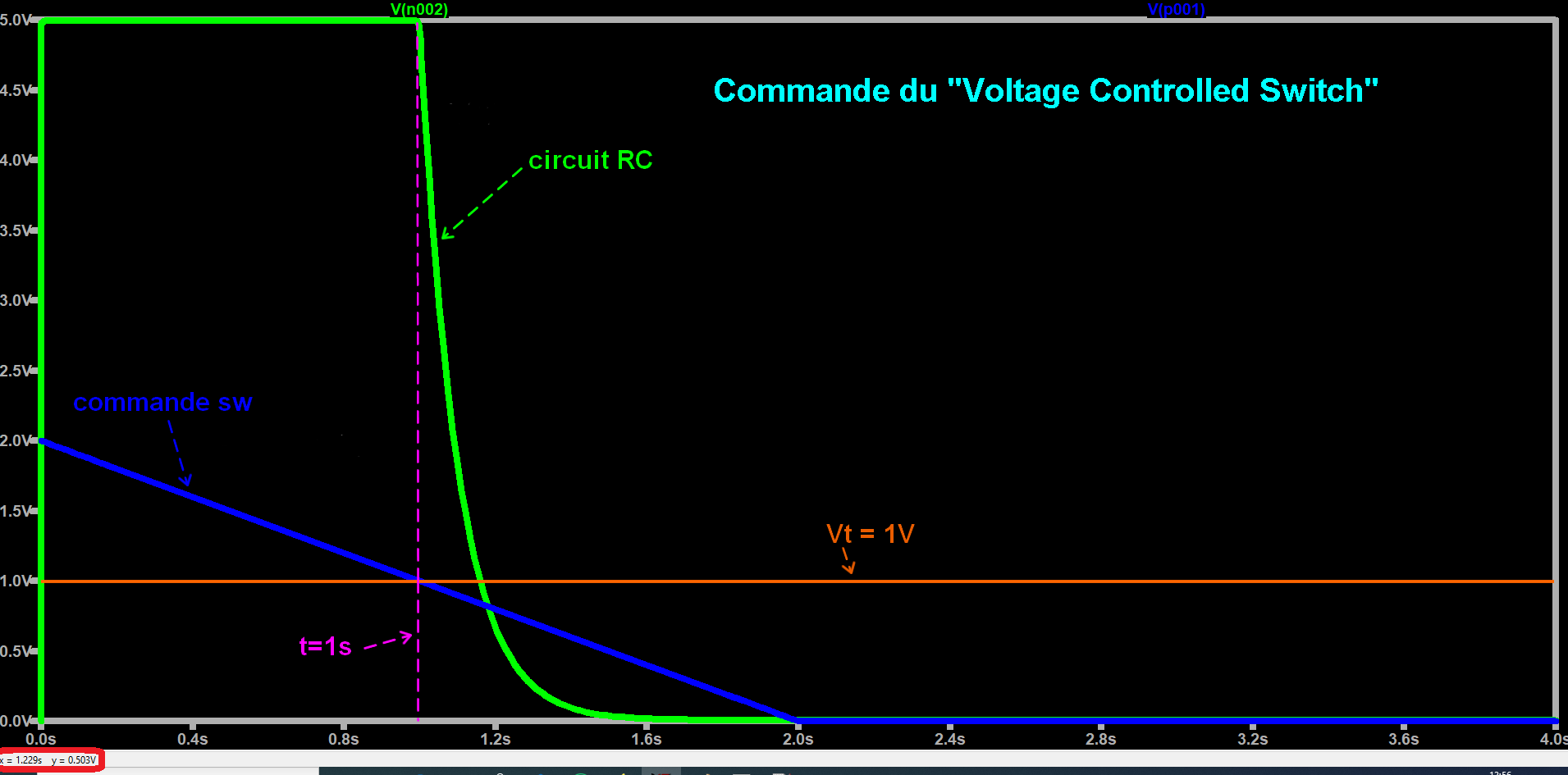
On trace les courbes. En bleu, la tension « de commande ». En vert, la tension aux bornes du condensateur.

La courbe en bleu passe en dessous de 1V au temps t= 1 seconde. Donc avant 1 s, le circuit est fermé et la tension aux bornes de la capa est de 5V. Quand le circuit est ouvert, à partir de 1 seconde, le condensateur se décharge dans la résistance.
Du fait que le produit RC=0.1, la tension est divisée par 10 en 0.23 secondes. Et donc, la tension aux bornes de la capa est de 0.5 V à t=1.23 s.
Le fichier LTspice du circuit est disponible ici.
Partie II : charge d’un condensateur et circuit purement capacitif
Les étapes de construction du circuit sont moins détaillées que dans la première partie.
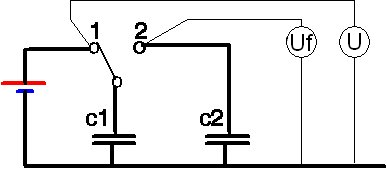
On met d'abord en place un circuit purement capacitif avec un switch en série..

On met en place le premier interrupteur de manière similaire à la partie I, avec une source de tension pour le piloter.

Même réglage de la tension qui pilote interrupteur que dans la partie I : l'interrupteur s'ouvre à t=1 sec.

Figure ci-dessous: ajout d'une seconde capa et d'un second interrupteur pour connecter les deux condensateurs ensemble à t=3 secondes.

Réglage de la tension qui pilote le second interrupteur: 0V pendant 2 sec puis 2V à 4 sec, linéaire. Ainsi le seuil 1V est dépassé à 3 sec, l'interrupteur numéro 2 se ferme.

Une fois les deux générateurs de tension qui pilotent les interrupteurs réglés:

Finalisation du circuit: les directives spice pour les « Voltage Controlled Switches ».
On a utilisé le même modèle pour les deux interrupteurs (monSW1 et monSW2). Les directives « .model monSW1 SW(…) » et « .model monSW2 SW(…) » sont identiques: une résistance Ron à 1 Ω et Roff à 100 M Ω et une tension seuil de 1 Volt.
Circuit final:

Le fichier LTspice du circuit est disponible ici.
Le hic!!!
Ci-dessous les courbes: en vert la tension aux bornes de C1 et en bleu la tension aux bornes de C2. En marron, la ligne constante à 1V. Au départ, Le condensateur 1 est très rapidement chargé. Le premier interrupteur s’ouvre à t=1s et le second interrupteur se ferme à t=3s.
Le premier switch s’ouvre à t=1 seconde, car la courbe bleu claire passe en dessous de 1V et le second switch se ferme à t=3 secondes, car la courbe rouge passe au-dessus de 1V.
La tension aux bornes des 2 capas est : 2.5 Volts, soit U/2 et non pas U/racine(2).

Explication possible
La charge électrique q d’un condenseur s’écrit : q = C U.
Lorsqu’on met les deux condensateurs en parallèle, la charge électrique reste la même, mais la capacité C est multiplié par deux. Par conséquent, la tension est divisée par deux: q = C U = 2C U/2.
Vraiment bizarre!!!!
Liens utiles:
tutoriel pour apprendre à utiliser LTspice
Les raccourcis clavier
changer la taille des lignes et des caractères sur les figures (en Anglais)
cours sur les condensateurs
créer un interrupteur sous LTspice (discussion)